Dijkstra's Algorithm
Dijkstra's Algorithm is a single-source shortest path algorithm proposed by Dutch computer scientist Edsger W. Dijkstra in 1956. It is used to solve the problem of finding the shortest paths from a single source node to all other nodes in a weighted directed or undirected graph (requiring all edge weights in the graph to be non-negative).
I. Core Idea
Greedy Strategy: In each iteration, select the node with the shortest distance to the source node from the set of nodes whose shortest paths have not been determined, and mark it as "determined".Relaxation Operation: Using this node as an intermediary, update the distance from its adjacent nodes to the source node.Repeat the above steps until all nodes are marked as "determined".
II. Algorithm Steps (Taking an Undirected Weighted Graph as an Example)
Assume the graph has n nodes and the source node is s:
Initialization:
- Distance array
dist[]:dist[s] = 0(the distance from the source node to itself is 0), anddist[i] = ∞(infinity) for all other nodes. - Mark array
visited[]: All nodes are initialized tofalse(shortest path not determined). - Priority Queue (Min-Heap): Stores
(current distance, node), initialized with(0, s)enqueued. (The naive solution does not use a priority queue.)
Iterative Solution:
- Extract the node
uwith the minimum distance from the priority queue; skip ifuhas been visited. - Mark
uas visited (visited[u] = true). - Traverse all adjacent nodes
vofu: ifdist[v] > dist[u] + weight(u, v), updatedist[v] = dist[u] + weight(u, v)and enqueue(dist[v], v).
Termination Condition:
The priority queue is empty, and the dist[] array now stores the shortest paths from the source node to all nodes. (The naive solution does not use a priority queue.)
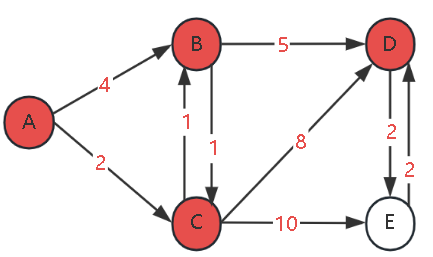
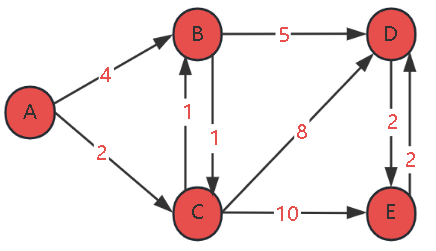
III. Detailed Example
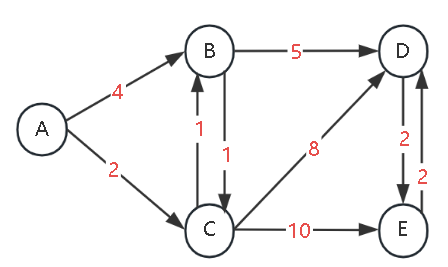
State Table Tracking:
We focus on two states of each node:
dist[v]: The current known shortest distance estimate from the source node A to node v.final[v]: Whether this distance has been confirmed as the final shortest distance (Yes/No).
Algorithm Step-by-Step:
In each step, select the node with the smallest dist value among all nodes where final is "No" for processing.
Step 0: Initialization
Set dist[A] = 0, and ∞ for all other nodes. All nodes are undetermined.
| Node | dist | final | Description |
|---|---|---|---|
| A | 0 | No | Source node |
| B | ∞ | No | |
| C | ∞ | No | |
| D | ∞ | No | |
| E | ∞ | No |
Current processed node: NoneSelection logic: Prepare to select the node with the smallest dist value from all undetermined nodes.
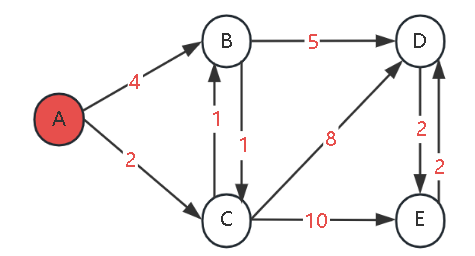
Step 1: Process Node A
Among all undetermined nodes {A(0), B(∞), C(∞), D(∞), E(∞)}, the smallest dist value is A. Mark it as determined.Check all outgoing edges of A and update the dist values of its neighbors:
- A->B:
dist[B] = min(∞, 0+4) = 4 - A->C:
dist[C] = min(∞, 0+2) = 2
Updated state:
| Node | dist | final | Description |
|---|---|---|---|
| A | 0 | Yes | Determined |
| B | 4 | No | Updated via A |
| C | 2 | No | Updated via A |
| D | ∞ | No | |
| E | ∞ | No |
Current processed node: ASelection logic: Select the node with the smallest dist value from undetermined nodes {B(4), C(2), D(∞), E(∞)} (i.e., C).
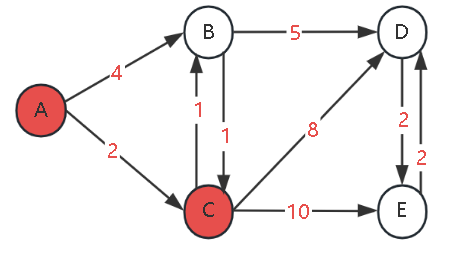
Step 2: Process Node C
Among undetermined nodes, the smallest dist value is C(2). Mark it as determined.Check all outgoing edges of C and update the dist values of undetermined neighbors:
- C->B:
dist[B] = min(4, 2+1) = 3(updated) - C->D:
dist[D] = min(∞, 2+8) = 10 - C->E:
dist[E] = min(∞, 2+10) = 12
Updated state:
| Node | dist | final | Description |
|---|---|---|---|
| A | 0 | Yes | |
| B | 3 | No | Updated via C |
| C | 2 | Yes | Determined |
| D | 10 | No | Updated via C |
| E | 12 | No | Updated via C |
Current processed node: CSelection logic: Select the node with the smallest dist value from undetermined nodes {B(3), D(10), E(12)} (i.e., B).
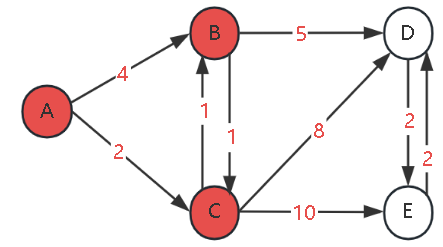
Step 3: Process Node B
Among undetermined nodes, the smallest dist value is B(3). Mark it as determined.Check all outgoing edges of B:
- B->C: C is determined, skip.
- B->D:
dist[D] = min(10, 3+5) = 8(updated)
Updated state:
| Node | dist | final | Description |
|---|---|---|---|
| A | 0 | Yes | |
| B | 3 | Yes | Determined |
| C | 2 | Yes | |
| D | 8 | No | Updated via B |
| E | 12 | No |
Current processed node: BSelection logic: Select the node with the smallest dist value from undetermined nodes {D(8), E(12)} (i.e., D).
Step 4: Process Node D
Among undetermined nodes, the smallest dist value is D(8). Mark it as determined.Check all outgoing edges of D:
- D->E:
dist[E] = min(12, 8+2) = 10(updated)
Updated state:
| Node | dist | final | Description |
|---|---|---|---|
| A | 0 | Yes | |
| B | 3 | Yes | |
| C | 2 | Yes | |
| D | 8 | Yes | Determined |
| E | 10 | No | Updated via D |
Current processed node: DSelection logic: Select the node with the smallest dist value from undetermined nodes {E(10)} (i.e., E).
Step 5: Process Node E
The last undetermined node is E(10). Mark it as determined.Check the outgoing edge E->D: D is determined, skip.Final state:
| Node | dist | final | Description |
|---|---|---|---|
| A | 0 | Yes | |
| B | 3 | Yes | |
| C | 2 | Yes | |
| D | 8 | Yes | |
| E | 10 | Yes | Determined |
Current processed node: ESelection logic: All nodes are determined; the algorithm terminates.
Final Results
Shortest distances from source node A to all nodes:
- A: 0
- C: 2
- B: 3
- D: 8
- E: 10
Process Summary:
- Initialize the distance (
dist) and confirmation state (final) of all nodes. - Repeat the following steps until
finalis "Yes" for all nodes:a. Select: Choose the nodeuwith the smallestdistvalue among all nodes wherefinalis "No".b. Confirm: Markfinal[u]as "Yes". At this point,dist[u]is the final shortest distance from A to u.c. Relax: For each neighborvofu(andvis undetermined), attempt to updatedist[v]withdist[u] + weight(u, v)if it is smaller. - The final values in the
distcolumn of the table are the shortest path distances.
IV. Reference Code
1. Naive Solution
#include <iostream>
#include <climits>
using namespace std;
const int MAX_N = 100; // Maximum number of nodes
int graph[MAX_N][MAX_N]; // Adjacency matrix
int dist1[MAX_N]; // Distance array for Method 1
int dist2[MAX_N]; // Distance array for Method 2
bool visited[MAX_N]; // Visit mark array
int n; // Actual number of nodes
// Naive Dijkstra's algorithm implementation (without STL)
void dijkstra_naive_no_stl(int src) {
// Initialization
for (int i = 0; i < n; i++) {
dist1[i] = INT_MAX; // Initialize distance to infinity
visited[i] = false; // All nodes are unvisited
}
// Set distance of source node to 0
dist1[src] = 0;
// Need to process n nodes
for (int i = 0; i < n; i++) {
// Step 1: Find the node with the minimum distance among undetermined nodes
int u = -1;
int min_dist = INT_MAX;
for (int j = 0; j < n; j++) {
if (!visited[j] && dist1[j] < min_dist) {
min_dist = dist1[j];
u = j;
}
}
// If no processable node is found (graph is disconnected), terminate early
if (u == -1) break;
// Step 2: Mark the node as determined
visited[u] = true;
// Step 3: Relaxation operation - update distances of all neighbors
for (int v = 0; v < n; v++) {
// If there is an edge from u to v (graph[u][v] != 0)
if (graph[u][v] != 0 && !visited[v] && dist1[u] != INT_MAX) {
int new_dist = dist1[u] + graph[u][v];
if (new_dist < dist1[v]) {
dist1[v] = new_dist;
}
}
}
}
}
// Version using adjacency matrix (more naive)
void dijkstra_adj_matrix(int src) {
// Initialize visited array
for (int i = 0; i < n; i++) {
visited[i] = false;
}
// Initialize distance array
for (int i = 0; i < n; i++) {
dist2[i] = graph[src][i] == 0 ? INT_MAX : graph[src][i];
}
dist2[src] = 0;
visited[src] = true;
// Process the remaining n-1 nodes
for (int count = 0; count < n - 1; count++) {
// Find the unvisited node with the minimum distance
int u = -1;
int min_dist = INT_MAX;
for (int i = 0; i < n; i++) {
if (!visited[i] && dist2[i] < min_dist) {
min_dist = dist2[i];
u = i;
}
}
if (u == -1) break;
visited[u] = true;
// Update distances to other nodes via u
for (int v = 0; v < n; v++) {
if (!visited[v] && graph[u][v] != 0 && dist2[u] != INT_MAX) {
int new_dist = dist2[u] + graph[u][v];
if (new_dist < dist2[v]) {
dist2[v] = new_dist;
}
}
}
}
}
// Initialize the graph
void init_graph() {
// Initialize adjacency matrix to 0 (indicating no edge)
for (int i = 0; i < MAX_N; i++) {
for (int j = 0; j < MAX_N; j++) {
graph[i][j] = 0;
}
}
// Example: Build the same graph as before
n = 5; // Number of nodes: A(0), B(1), C(2), D(3), E(4)
// Add edges (represented by adjacency matrix)
// Note: 0 means no edge, other values represent edge weights
graph[0][1] = 4; // A->B (4)
graph[0][2] = 2; // A->C (2)
graph[1][2] = 1; // B->C (1)
graph[1][3] = 5; // B->D (5)
graph[2][1] = 1; // C->B (1)
graph[2][3] = 8; // C->D (8)
graph[2][4] = 10; // C->E (10)
graph[3][4] = 2; // D->E (2)
graph[4][3] = 2; // E->D (2)
}
int main() {
// Initialize the graph
init_graph();
// Calculate shortest paths starting from node 0 (A)
int src = 0;
cout << "Method 1: Naive implementation with adjacency list logic" << endl;
dijkstra_naive_no_stl(src);
cout << "Method 2: Naive implementation with adjacency matrix" << endl;
dijkstra_adj_matrix(src);
// Output results
char node_names[] = {'A', 'B', 'C', 'D', 'E'};
cout << "\nShortest distances from node " << src << " (A) to all nodes:" << endl;
cout << "Node\tMethod 1\tMethod 2" << endl;
cout << "----------------------" << endl;
for (int i = 0; i < n; i++) {
cout << node_names[i] << "\t";
if (dist1[i] == INT_MAX) {
cout << "INF";
} else {
cout << dist1[i];
}
cout << "\t";
if (dist2[i] == INT_MAX) {
cout << "INF";
} else {
cout << dist2[i];
}
cout << endl;
}
return 0;
}
2. Priority Queue Solution
#include <iostream>
#include <vector>
#include <queue>
#include <climits>
using namespace std;
typedef pair<int, int> pii; // Custom type alias
/**
* Dijkstra's Algorithm - Adjacency List + Priority Queue Version
* n: Number of nodes (0 ~ n-1)
* adj: Adjacency list, adj[u] = vector<{v, w}> meaning edge u->v with weight w
* src: Source node
* Return: Shortest distances from the source node to all nodes
*/
vector<int> dijkstra(int n, vector<vector<pii>>& adj, int src) {
vector<int> dist(n, INT_MAX); // Initialize distance array
vector<bool> visited(n, false); // Initialize mark array
priority_queue<pii, vector<pii>, greater<pii>> pq; // Min-heap (sorted by first element in ascending order by default)
dist[src] = 0;
pq.push(make_pair(0, src)); // make_pair deduces type automatically
while (!pq.empty()) {
pii current = pq.top(); // Head of the priority queue
pq.pop();
int d = current.first; // Current shortest distance from source to node u
int u = current.second; // Node
// Skip if this distance is outdated
if (d > dist[u]) continue;
// Mark as visited
visited[u] = true;
// Traverse all neighbors
for (int i = 0; i < adj[u].size(); i++) {
int v = adj[u][i].first; // Get neighbor node number
int w = adj[u][i].second; // Get weight of edge u->v
if (!visited[v]) {
int new_dist = dist[u] + w;
if (new_dist < dist[v]) {
dist[v] = new_dist; // Update distance to v
pq.push(make_pair(new_dist, v));// Store distance first, then node in pq
}
}
}
}
return dist;
}
int main() {
int n = 5; // Number of nodes
vector<vector<pii>> adj(n);
// Build the graph
adj[0].push_back(make_pair(1, 4));
adj[0].push_back(make_pair(2, 2));
adj[1].push_back(make_pair(2, 1));
adj[1].push_back(make_pair(3, 5));
adj[2].push_back(make_pair(1, 1));
adj[2].push_back(make_pair(3, 8));
adj[2].push_back(make_pair(4, 10));
adj[3].push_back(make_pair(4, 2));
adj[4].push_back(make_pair(3, 2));
int src = 0;
vector<int> dist = dijkstra(n, adj, src);
cout << "Shortest distances from node " << src << " to all nodes:" << endl;
for (int i = 0; i < n; i++) {
if (dist[i] == INT_MAX)
cout << i << ": INF" << endl;
else
cout << i << ": " << dist[i] << endl;
}
return 0;
}
Notes:
typedef pair<int, int> pii; // Custom type alias This defines a custom type alias. A common usage in programming is:
typedef long long ll;
In addition, the meanings of first and second differ in two places: for pii, it only represents a pair of two int values, and the specific meaning is determined by the user.
3. Dijkstra's Algorithm with Path Recording
#include <iostream>
#include <vector>
#include <queue>
#include <climits>
#include <algorithm> // Used for reverse to invert the path
using namespace std;
typedef pair<int, int> pii; // Custom type alias
/**
* Dijkstra's Algorithm - Adjacency List + Priority Queue Version (with Path Recording)
* n: Number of nodes (0 ~ n-1)
* adj: Adjacency list, adj[u] = vector<{v, w}> meaning edge u->v with weight w
* src: Source node
* path: Output parameter: path[v] stores the predecessor node of v (used to backtrack the path)
* Return: Shortest distances from the source node to all nodes
*/
vector<int> dijkstra(int n, vector<vector<pii>>& adj, int src, vector<int>& path) {
vector<int> dist(n, INT_MAX); // Distance array: shortest distance from src to each node
vector<bool> visited(n, false); // Mark array: whether the node's shortest distance is determined
priority_queue<pii, vector<pii>, greater<pii>> pq; // Min-heap (sorted by distance in ascending order)
// Initialization: path array initialized to -1 (indicating no predecessor node)
path.assign(n, -1);
dist[src] = 0;
pq.push(make_pair(0, src));
while (!pq.empty()) {
pii current = pq.top();
pq.pop();
int d = current.first; // Current distance from src to u
int u = current.second; // Current node
// Skip if distance is outdated (a shorter path has been found)
if (d > dist[u]) continue;
visited[u] = true;
// Traverse all neighbors of u
for (int i = 0; i < adj[u].size(); i++) {
int v = adj[u][i].first; // Neighbor node
int w = adj[u][i].second; // Edge weight
if (!visited[v]) {
int new_dist = dist[u] + w;
// Find a shorter path: update distance + record predecessor node
if (new_dist < dist[v]) {
dist[v] = new_dist;
path[v] = u; // Record u as the predecessor of v
pq.push(make_pair(new_dist, v));
}
}
}
}
return dist;
}
/**
* Backtrack the path: reverse from target node to source node, then invert to get the forward path
* src: Source node
* target: Target node
* path: Predecessor node array
* Return: Shortest path from src to target (forward order)
*/
vector<int> getShortestPath(int src, int target, const vector<int>& path) {
vector<int> res;
// Return empty path if target node is unreachable
if (path[target] == -1 && src != target) {
return res;
}
// Backtrack from target to src
for (int cur = target; cur != -1; cur = path[cur]) {
res.push_back(cur);
}
// Invert to get forward path (src -> ... -> target)
reverse(res.begin(), res.end());
return res;
}
int main() {
int n = 5; // Number of nodes (0~4)
vector<vector<pii>> adj(n);
// Build the graph
adj[0].push_back(make_pair(1, 4));
adj[0].push_back(make_pair(2, 2));
adj[1].push_back(make_pair(2, 1));
adj[1].push_back(make_pair(3, 5));
adj[2].push_back(make_pair(1, 1));
adj[2].push_back(make_pair(3, 8));
adj[2].push_back(make_pair(4, 10));
adj[3].push_back(make_pair(4, 2));
adj[4].push_back(make_pair(3, 2));
int src = 0;
vector<int> path; // Store predecessor nodes of each node
vector<int> dist = dijkstra(n, adj, src, path);
// Output shortest distances + shortest paths
cout << "Shortest distances and paths from node " << src << " to all nodes:" << endl;
for (int i = 0; i < n; i++) {
cout << "Node " << i << ": ";
if (dist[i] == INT_MAX) {
cout << "INF (No path)" << endl;
} else {
cout << "Distance=" << dist[i] << ", Path: ";
vector<int> shortest_path = getShortestPath(src, i, path);
// Output path
for (int j = 0; j < shortest_path.size(); j++) {
if (j > 0) cout << " -> ";
cout << shortest_path[j];
}
cout << endl;
}
}
return 0;
}/*
Shortest distances and paths from node 0 to all nodes:
Node 0: Distance=0, Path: 0
Node 1: Distance=3, Path: 0 -> 2 -> 1
Node 2: Distance=2, Path: 0 -> 2
Node 3: Distance=8, Path: 0 -> 2 -> 1 -> 3
Node 4: Distance=10, Path: 0 -> 2 -> 1 -> 3 -> 4
*/Key Explanations:
patharray:- Type:
vector<int>,path[v] = umeans "In the shortest path to node v, the previous node of v is u". - Initialization: All elements are set to -1 (indicating no predecessor node; the source node's predecessor is always -1).
- Update logic: When a shorter path to node v is found, update
path[v] = usynchronously (u is the current node).
- Type:
getShortestPathfunction:- Function: Backtrack from the target node to the source node via the
patharray. - Processing: The backtracked path is in reverse order (target -> ... -> src), so
reverseis used to invert it to the forward path. - Boundary: If
path[target] == -1andtarget != src, the target node is unreachable, return an empty path.
- Function: Backtrack from the target node to the source node via the